可编程能力与传感技术使机器人具有感觉、识别、推理和判断的能力,能够适应外界条件变化并自适应地对自身工作进行调整,达到了智能的程度。但归根到底,这类智能机器人运行的规则仍然由人类规定,在特定的环境下如何调整也要遵循预先设定的原则。由此,机器人下一步的发展目标就是具备更高级别的智能:机器人自己通过学习,总结经验来获得修改程序的原则。这种机器人已拥有一定的自动规划能力,能够自动安排自己的任务,可以在无人值守的情况下完全独立的工作。伴随着这一潮流诞生的则是智能机器人的全新形态。
时间进入20世纪60年代后,传感器技术被应用在机器人产业中,提升了机器人的可控制性。带有触觉传感器的数控机械手被引入机器人中,这种机械手能够自主识别块状材料并将其堆叠起来,而无需人工干预。约翰霍普金斯大学则研制出机器人“怪兽(Beast)"。怪兽已经能通过声纳系统、光电管等装置根据环境校正自己的位置,这使它在合理的非结构性环境中具备了自适应的特性。斯坦福大学则更进一步,开发出有手(机械手)、眼(摄像头)和耳(拾音器)的机器人“摇摆(Shakey)”。摇摆能够“看见”散放在桌面上的方块,识别语音指令并按指令进行操作。在这一时期,几个工业化国家竞相开展具有视觉触觉和优异的操控性能,能避障、钻洞、爬墙甚至水下移动的各种智能机器人的研究工作,并开始在海洋开发、空间探索和核工业中试用。在20世纪80年代中期,机器人的技术水平越来越完善,在各类工业生产中广泛普及,机器人应用制造业已成为发展最快和最好的经济部门之一。
2011年10月,苹果公司在其手机操作系统iOS中首次集成了语音助手,Siri就此闪亮登场。由于Siri的早期版本功能较弱,调戏Siri也就成了苹果手机用户喜闻乐见的谈资,但语音助手作为机器人的全新模式,其引发的潮流就此势不可挡。2012年7月,谷歌公司推出了自己的语音助手Google Now.2014年2月,不甘落后的微软公司也推出了自己的语音助手小娜(Cortana),并嵌入安装Windows操作系统的计算机和手机中。借助微软自身深厚的技术功底,Cortana实现了对语音的较高识别率和与系统功能的深度集成,给微软用户带来了不少便利。很快,微软又趁热打铁推出了跨平台的聊天程序小冰,这个“不良少女”所引起的槽点满满的轩然大波算是语音助手发展历史中一个有趣的注脚。
自此,计算机技术走进了机器人的身体,使机器人的发展步入了新纪元,并催生了机器人产业:1954年,工业机器人先驱乔治·德沃尔(George Devol)创造了世界第一台可编程机器人“尤尼梅特(Unimate)",并借此东风与他的商业伙伴约瑟夫·恩格尔伯格(Joseph Engelberger)创立了全世界第一家机器人公司Unimation,打响了机器人产业的第一炮。尤尼梅特的核心技术是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现。它采用了分离式固体数控元件,并装有存储信息的磁鼓,具有更好的通用性和灵活性。与此同时,美国机床制造公司也研制出了工业机器人“万能搬运(VERSAtile TRANsfer)"。万能搬运主要用于机器之间的物料运输、采用液压驱动。该机器人的手臂可以绕底座回转,沿垂直方向升降,也可以沿半径方向伸缩。尤尼梅特和万能搬运是世界上最早的商业化工业机器人,代表了当年可编程机器人的最高水平。
Siri也好,小娜也罢,其本质都只是一团代码,与传统意义上的机器人搭不上一点儿关系。可他们又确确实实是机器人——不仅形态全新,而且功能全新。语音助手的简化形式——俗话说的聊天机器人,也就是前面所说的小冰——具有对话和在对话中学习两种基本功能。对话的原理是先从对方提问中提取关键词,再到网络中检索匹配度高的答案,以此回答对方;而从对话中学习,是在过往对话中提取有效对话增加到自己的数据库中。事实上,这类聊天机器人更像是个搜索工具:把人类的对话输入作为关键词在网络上搜索对应的回复。目前,语音助手在事务性指令上处理的效果较优,但聊天机器人依然是答非所问和不知所云的代名词。可这样的结果恰恰反证了方式的先进性:语音助手并非按照预设的规则回答问题,而是完全以自主学习的方式实现对自然语言的理解,这与传统的工业机器人有本质区别。虽然受技术条件限制,现有程序还不能在大数据的研究中习得深层次的判断能力和理解能力,但在原理上并不存在不可逾越的障碍。而对于传统的工业机器人来说,自主学习显然是不可完成的任务。
在20世纪以前,机器人的发展动力还来源于机械控制,因而只能说是技术,称不上是科学。这一局面在1948年被打破:天才学者维纳(人工智能行为主义学派的奠基人,参见第一章)建立起新型学科“控制论(Cybernetics)”并出版了同名巨著,阐述了机器中的通信和控制机能与人的神经、感觉机能的共同规律。在此基础上,维纳深入探讨了机器与人的统一性,揭示了机器通过反馈控制模拟人类的可能性,这不仅成为人工智能中行为主义学派的理论基础,也为机器人的发展开拓出一条新路。
关于机器人思考能力的进化更直观更形象的实例,是无人驾驶汽车的出现。
机器人的设计并非中国人的专利。看过《达芬奇密码》的人必然对列奥纳多·达芬奇(Leonardo da Vinci)的惊世之才赞叹不已,历史上的达芬奇其人也的确是个百科全书式的人物,对于机械设计尤其在行。15世纪,达芬奇在人体解剖学的知识基础上利用木头、皮革和金属外壳设计出了机械版的装甲兵。根据记载,这个机器人以齿轮作为驱动装置,肌体间连接传动杆,不仅可以完成一些简单动作,内部的自动鼓装置还能以阵阵鼓声提振士气。三百年后,瑞士的钟表匠人使用凸轮控制和弹簧驱动的原理设计出了三个真人大小的机器人——写字偶人、绘图偶人和风琴偶人,这些多才多艺的偶人直到今天还保存在瑞士纳沙泰尔市的博物馆中。
早在上世纪的八九十年代,德国慕尼黑和意大利帕尔玛就出现过无人驾驶的演示。无人驾驶在诸如换档、变速等技术上的困难已经被完全克服,换句话说,在无人的环境下无人驾驶一点儿问题都没有。可是在全天候全路况的实际条件下,早年间的无人驾驶技术就会变身马路杀手。这也说明了为什么无人驾驶由互联网巨头谷歌,而非奔驰、奥迪等传统车企取得突破。由于本书并非技术类书籍,因而无人驾驶的技术细节在本书中不做赘述,而是用一些数据代替:截至2015年6月,谷歌开发的无人驾驶汽车已行驶超过160万公里,相当于成年人大约一辈子的驾驶公里数;截至2016年2月,无人车经历了14次交通事故,其中13次是由人类司机的行为导致。只有一次是障碍避让导致了撞车。
中国古代关于机器人的记述可不光这一种。著名的科学典籍《墨经》中曾记载,木匠祖师爷鲁班曾经使用竹子和木头作为原料制造出一只木鸟,在空中连续飞行三天三夜;而根据《三国演义》中的说法,鞠躬尽瘁死而后已的诸葛亮不光韬略出众,工程技术水平也相当了得:他设计的具备传动装置的木牛流马可称为最早的陆地军用机器人,运输粮食时本来大步流星,但舌头一扭便纹丝不动,只留下劫粮成功满心欢喜的魏军大眼瞪小眼。

虽然机器人一词的出现和世界上第一台工业机器人的问世都是二十世纪的事情,但人类对机器人的追求却源远流长。根据西周时期的记述,当时的能工巧匠偃师给周穆王献上用动物皮、木头、树脂制造出的美女伶人——无疑是今天各式各样类人机器人的老祖宗。更牛的是,这位美女不仅能歌善舞,甚至还有七情六欲。这样的木头伶人固然是寓言中的幻想,但它从一个侧面反映出当时的科技发展水平,也是中国最早记载的木头机器人雏形。
图5-3 由凌志RX450h改装的谷歌无人驾驶汽车
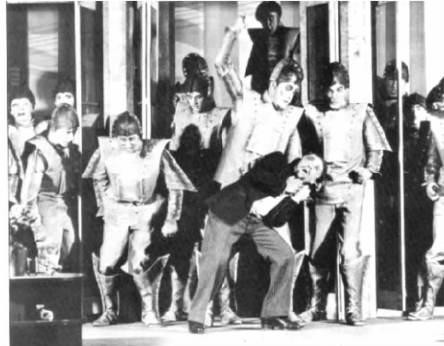
图5-2 《罗萨姆的机器人万能公司》剧照:反抗的机器人
从机器人的发展历程来看,谷歌无人驾驶汽车具有里程碑式的意义。人类的自然科学从一开始就建立在严密的逻辑和规则之上,机器人也是从空间上时间上都可以精确执行的任务开始。在这个层次上,人类已经把各种内部外部的影响因素做好了建模,机器人只是求解这一模型的数学工具。随着实现的功能的复杂化,机器人的结构也变得越来越精细,但它不具备、也不需要具备基本的认知能力。谷歌汽车的出现实质上就是对建立机器人认知能力的尝试。复杂的人类世界是不可能用确定的模型描述的,要适应这样的环境,机器人就必须自适应地理解环境,首先是从大量实例中学习必要的规则,再根据学习的规则形成判断的思维,最后利用这思维指导实际的决策。与传统的工业机器人相比,谷歌汽车在工程上的突破也许有限,但它却有希望成为第一个在复杂环境中替代人类劳动的机器人,这无疑意义深远。
无论是语音助手还是无人驾驶,都有很长的路要走,可它们已经指明了机器思考能力进化的道路。
今天,机器人与人工智能这两个概念已经是你中有我,我中有你。可出人意料的是,机器人的英文单词robot却是在一个世纪之前由一位文学家创造的。1920年,捷克斯洛伐克作家卡雷尔·恰佩克(Karel Capek)在他的剧本《罗萨姆的机器人万能公司》中,根据捷克语单词robota(意为“劳役、苦工”)和波兰语单词robotnik(原意为“工人”),创造出“机器人”这个单词。由此可见,人类对机器人的定位只是一种基于机械设备的劳动工具,跟智能原本是八杆子打不着的。